CAVITATION AND BUBBLE DYNAMICS
by Christopher Earls Brennen © Oxford University Press 1995
CHAPTER 8.
FREE STREAMLINE FLOWS
8.1 INTRODUCTION
In this chapter we briefly survey the extensive literature on fully developed cavity flows and the methods used for their solution. The terms ``free streamline flow'' or ``free surface flow'' are used for those situations that involve a ``free'' surface whose location is initially unknown and must be found as a part of the solution. In the context of some of the multiphase flow literature, they would be referred to as separated flows. In the introduction to Chapter 6 we described the two asymptotic states of a multiphase flow, homogeneous and separated flow. Chapter 6 described some of the homogeneous flow methods and their application to cavitating flows; this chapter presents the other approach. However, we shall not use the term separated flow in this context because of the obvious confusion with the accepted, fluid mechanical use of the term.
Fully developed cavity flows constitute one subset of free surface flows, and this survey is intended to provide information on some of the basic properties of these flows as well as the methods that have been used to generate analytical solutions of them. A number of excellent reviews of free streamline methods can be found in the literature, including those of Birkkoff and Zarantonello (1957), Parkin (1959), Gilbarg (1960), Woods (1961), Gurevich (1961), Sedov (1966), and Wu (1969, 1972). Here we shall follow the simple and elegant treatment of Wu (1969, 1972).
The subject of free streamline methods has an interesting history, for one can trace its origins to the work of Kirchhoff (1869), who first proposed the idea of a ``wake'' bounded by free streamlines as a model for the flow behind a finite, bluff body. He used the mathematical methods of Helmholtz (1868) to find the irrotational solution for a flat plate set normal to an oncoming stream. The pressure in the wake was assumed to be constant and equal to the upstream pressure. Under these conditions (the zero cavitation number solution described below) the wake extends infinitely far downstream of the body. The drag on the body is nonzero, and Kirchhoff proposed this as the solution to D'Alembert's paradox (see Section 5.2), thus generating much interest in these free streamline methods, which Levi-Civita (1907) later extended to bodies with curved surfaces. It is interesting to note that Kirchhoff's work appeared many years before Prandtl discovered boundary layers and the reason for the wake structure behind a body. However, Kirchhoff made no mention of the possible application of his methods to cavity flows; indeed, the existence of these flows does not seem to have been recognized until many years later.
In this review we focus on the application of free streamline methods to fully developed cavity flows; for a modern view of their application to wake flows the reader is referred to Wu (1969, 1972). It is important to take note of the fact that, because of its low density relative to that of the liquid, the nature of the vapor or gas in the fully developed cavity usually has little effect on the liquid flow. Thus the pressure gradients due to motion of the vapor/gas are normally negligible relative to the pressure gradients in the liquid, and consequently it is usually accurate to assume that the pressure, pc , acting on the free surface is constant. Similarly, the shear stress that the vapor/gas imposes on the free surface is usually negligible. Moreover, other than the effect on pc , it is of little consequence whether the cavity contains vapor or noncondensable gas, and the effect of pc is readily accommodated in the context of free streamline flows by defining the cavitation number, σ, as
 | ......(8.1) |
Most of the available free streamline methods assume inviscid, irrotational and incompressible flow, and comparisons with experimental data suggest, as we shall see, that these are reasonable approximations. Viscous effects in fully developed cavity flows are usually negligible so long as the free streamline detachment locations (see Figure 8.1) are fixed by the geometry of the body. The most significant discrepancies occur when detachment is not fixed but is located at some initially unknown point on a smooth surface (see Section 8.3). Then differences between the calculated and observed detachment locations can cause substantial discrepancies in the results.
|
| Figure 8.1 Schematic showing the terminology used in the free streamline analysis. |
Assuming incompressible and irrotational flow, the problems require solution of Laplace's equation for the velocity potential, φ(xi ,t),
 | ......(8.2) |
-
On a solid surface, SW(xi ,t), the kinematic condition of
no flow through that surface requires that

......(8.3) -
On a free surface, SF(xi ,t), a similar kinematic condition
that neglects the liquid evaporation rate yields
......(8.4) - Assuming that the pressure in the cavity, pc , is uniform and constant, leads to an additional dynamic boundary condition on SF. Clearly, the dimensionless equivalent of pc , namely σ, is a basic parameter in this class of problem and must be specified a priori. In steady flow, neglecting surface tension and gravitational effects, the magnitude of the velocity on the free surface, qc , should be uniform and equal to U∞(1+σ)½.
The two conditions on the free surface create serious modeling problems both at the detachment points and in the cavity closure region (Figure 8.1). These issues will the addressed in the two sections that follow.
In planar, two-dimensional flows the powerful methods of complex variables and the properties of analytic functions (see, for example, Churchill 1948) can be used with great effect to obtain solutions to these irrotational flows (see the review articles and books mentioned above). Indeed, the vast majority of the published literature is devoted to such methods and, in particular, to steady, incompressible, planar potential flows. Under those circumstances the complex velocity potential, f, and the complex conjugate velocity, w, defined by
 | ......(8.5) |
 , defined by
, defined by
 | ......(8.6) |
|
| Figure 8.2 Closure models for the potential flow around an arbitrary body shape (AOB) with a fully developed cavity having free streamlines or surfaces as shown. In planar flow, these geometries in the physical or z-plane transform to the geometries shown in Figure 8.11. |
Addressing first the closure problem, it is clear that most of the complex processes that occur in this region and that were described in Section 7.10 cannot be incorporated into a potential flow model. Moreover, it is also readily apparent that the condition of a prescribed free surface velocity would be violated at a rear stagnation point such as that depicted in Figure 8.1. It is therefore necessary to resort to some artifact in the vicinity of this rear stagnation point in order to effect termination of the cavity. A number of closure models have been devised; some of the most common are depicted in Figures 8.2 and 8.3. Each has its own advantages and deficiences:
- Riabouchinsky (1920) suggested one of the simpler models, in which an ``image'' of the body is placed in the closure region so that the streamlines close smoothly onto this image. In the case of planar or axisymmetric bodies appropriate shapes for the image are readily found; such is not the case for general three-dimensional bodies. The advantage of the Riabouchinsky model is the simplicity of the geometry and of the mathematical solution. Since the combination of the body, its image, and the cavity effectively constitutes a finite body, it must satisfy D'Alembert's paradox, and therefore the drag force on the image must be equal and opposite to that on the body. Also note that the rear stagnation point is no longer located on a free surface but has been removed to the surface of the image. The deficiences of the Riabouchinsky model are the artificiality of the image body and the fact that the streamlines downstream are an image of those upstream. The model would be more realistic if the streamlines downstream of the body-cavity system were displaced outward relative to their locations upstream of the body in order to simulate the effect of a wake. Nevertheless, it remains one of the most useful models, especially when the cavity is large, since the pressure distribution and therefore the force on the body is not substantially affected by the presence of the distant image body.
- Joukowski (1890) proposed solving the closure problem by satisfying the dynamic free surface condition only up to a certain point on the free streamlines (the points C and C′ in Figure 8.2) and then somehow continuing these streamlines to downstream infinity, thus simulating a wake extending to infinity. This is known as the ``open-wake model.'' For symmetric, pure-drag bodies these continuations are usually parallel with the uniform stream (Roshko 1954). Wu (1956, 1962) and Mimura (1958) extended this model to planar flows about lifting bodies for which the conditions on the continued streamlines are more complex. The advantage of the open-wake model is its simplicity. D'Alembert's paradox no longer applies since the effective body is now infinite. The disadvantage is that the wake is significantly larger than the real wake (Wu, Whitney, and Brennen 1971). In this sense the Riabouchinsky and open-wake models bracket the real flow.
- The ``reentrant jet'' model, which was first formulated by Kreisel (1946) and Efros (1946), is also shown in Figure 8.2. In this model, a jet flows into the cavity from the closure region. Thus the rear stagnation point, R, has been shifted off the free surfaces into the body of the fluid. Moreover, D'Alembert's paradox is again avoided because the effective body is no longer simple and finite; one can visualize the momentum flux associated with the reentrant jet as balancing the drag on the body. One of the motivations for the model is that reentrant jets are often observed in real cavity flows, as discussed in Section 7.10. In practice the jet impacts one of the cavity surfaces and is reentrained in an unsteady and unmodeled fashion. In the mathematical model the jet disappears onto a second Riemann sheet. This represents a deficiency in the model since it implies an unrealistic removal of fluid from the flow and consequently a wake of ``negative thickness.'' In one of the few detailed comparisons with experimental observations, Wu et al. (1971) found that the reentrant jet model did not yield results for the drag that were as close to the experimental observations as the results for the Riabouchinsky and open-wake models.
- Two additional models for planar, two-dimensional flow were suggested by Tulin (1953, 1964) and are depicted in Figure 8.3. In these models, termed the ``single spiral vortex model'' and the ``double spiral vortex model,'' the free streamlines terminate in a vortex at the points P and P′ from which emerge the bounding streamlines of the ``wake'' on which the velocity is assumed to be U∞. The shapes of the two wake bounding streamlines are assumed to be identical, and their separation vanishes far downstream. The double spiral vortex model has proved particularly convenient mathematically (see, for example, Furuya 1975a) and has the attractive feature of incorporating a wake thickness that is finite but not as unrealistically large as that of the open-wake model. The single spiral vortex model has been extensively used by Tulin and others in the context of the linearized or small perturbation theory of cavity flows (see Section 8.7).
|
| Figure 8.3 Two additional closure models for planar flow suggested by Tulin (1953, 1964). The free streamlines end in the center of the vortices at the points P and P′ which are also the points of origin of the wake boundary streamlines on which the velocity is equal to U∞. |
Not included in this list are a number of other closure models that have either proved mathematically difficult to implement or depart more radically from the observations of real cavities. For a discussion of these the reader is referred to Wu (1969, 1972) or Tulin (1964). Moreover, most of the models and much of the above discussion assume that the flow is steady. Additional considerations are necessary when modeling unsteady cavity flows (see Section 8.12).
The other regions of the flow that require careful consideration are the points at which the free streamlines ``detach'' from the body. We use the word ``detachment'' to avoid confusion with the process of separation of the boundary layer. Thus the words ``separation point'' are reserved for boundary layer separation.
Since most of the mathematical models assume incompressible and irrotational potential flow, it is necessary to examine the prevailing conditions at a point at which a streamline in such a flow detaches from a solid surface. We first observe that if the pressure in the cavity is assumed to be lower than at any other point in the liquid, then the free surface must be convex viewed from the liquid. This precludes free streamlines with negative curvatures (the sign is taken to be positive for a convex surface). Second, we distinguish between the two geometric circumstances shown in Figure 8.4. Abrupt detachment is the term applied to the case in which the free surface leaves the solid body at a vertex or discontinuity in the slope of the body surface.
|
| Figure 8.4 Notation used in the discussion of the detachment of a free streamline from a solid body. |
For convenience in the discussion we
define a coordinate system, (s,n), whose origin is at the detachment
point or vertex. The direction of the coordinate, s, coincides
with the direction of the velocity vector at the detachment point and the
coordinate, n, is perpendicular to the solid surface. It is sufficiently
accurate for present purposes to consider the flow to be locally planar
and to examine the nature of the potential flow solutions in the immediate
neighborhood of the detachment point, D. Specifically, it is important
to identify the singular behavior at D. This is most readily
accomplished by using polar coordinates, (r,θ), where
z=s+in=r eiθ, and by considering the expansion of the
logarithmic hodograph variable,
(Equation 8.6), as a
power series in z. Since, to first order,
Re{} =0 on
θ=0 and
Im{}=0 on
θ=π, it follows
that, in general, the first term in this expansion is
 | ......(8.7) |
 | ......(8.8) |
 | ......(8.9) |
 | ......(8.10) |
Turning attention to the other possibility sketched in Figure 8.4, ``smooth detachment,'' one must first ask why it should be any different from abrupt detachment. The reason is apparent from one of the results of the preceding paragraph. An infinite, convex free-surface curvature at the detachment point is geometrically impossible at a smooth detachment point because the free surface would then cut into the solid surface. However, the position of the smooth detachment point is initially unknown. One can therefore consider a whole family of solutions to the particular flow, each with a different detachment point. There may be one such solution for which the strength of the singularity, C, is identically zero, and this solution, unlike all the others, is viable since its free surface does not cut into the solid surface. Thus the condition that the strength of the singularity, C, be zero determines the location of the smooth detachment point. These circumstances and this condition were first recognized independently by Brillouin (1911) and by Villat (1914), and the condition has become known as the Brillouin-Villat condition. Though normally applied in planar flow problems, it has also been used by Armstrong (1953), Armstrong and Tadman (1954), and Brennen (1969a) in axisymmetric flows.
The singular behavior at a smooth detachment point can be examined in
a manner similar to the above analysis of an abrupt detachment point.
Since the one-half power in the power law expansion of
is now
excluded, it follows from the conditions on the free and wetted surfaces
that
 | ......(8.11) |
|
| Figure 8.5 Observed and calculated locations of free surface detachment for a cavitating sphere. The detachment angle is measured from the front stagnation point. The analytical results using the smooth detachment condition are from Armstrong and Tadman (1954) and Brennen (1969a), in the latter case for different water tunnel to sphere radius ratios, B/b (see Figure 8.15). The experimental results are for different sphere diameters as follows: 7.62cm (circles) and 2.86cm (squares) from Brennen (1969a), 5.08cm (triangles) and 3.81cm (upsidedown triangles) from Hsu and Perry (1954). Tunnel velocities are indicated by the additional ticks at cardinal points as follows: 4.9m/s (NW), 6.1m/s (N), 7.6m/s (NE), 9.1m/s (E), 10.7m/s (SE), 12.2m/s (S) and 13.7m/s (SW). |
|
| Figure 8.6 Observed free surface detachment points from spheres for various cavitation numbers, σ, and Reynolds numbers. Also shown are the potential flow values using the smooth detachment condition. Adapted from Brennen (1969b). |
Having established these models for the detachment of the free streamlines in potential flow, it is important to emphasize that they are models and that viscous boundary-layer and surface-energy effects (surface tension and contact angle) that are omitted from the above discussions will, in reality, have a substantial influence in determining the location of the actual detachment points. This can be illustrated by comparing the locations of smooth detachment from a cavitating sphere with experimentally measured locations. As can readily be seen from Figures 8.5 and 8.6, the predicted detachment locations are substantially upstream of the actual detachment points. Moreover, the experimental data exhibit some systematic variations with the size of the sphere and the tunnel velocity. Exploring these scaling effects, Brennen (1969b) interpolated between the data to construct the variations with Reynolds number shown in Figure 8.6. This data clearly indicates that the detachment locations are determined primarily by viscous, boundary-layer effects. However, one must add that all of the experimental data used for Figure 8.6 was for metal spheres and that surface-energy effects and, in particular, contact-angle effects probably also play an important role (see Ackerberg 1975). The effect of the surface tension of the liquid seems to be relatively minor (Brennen 1970).
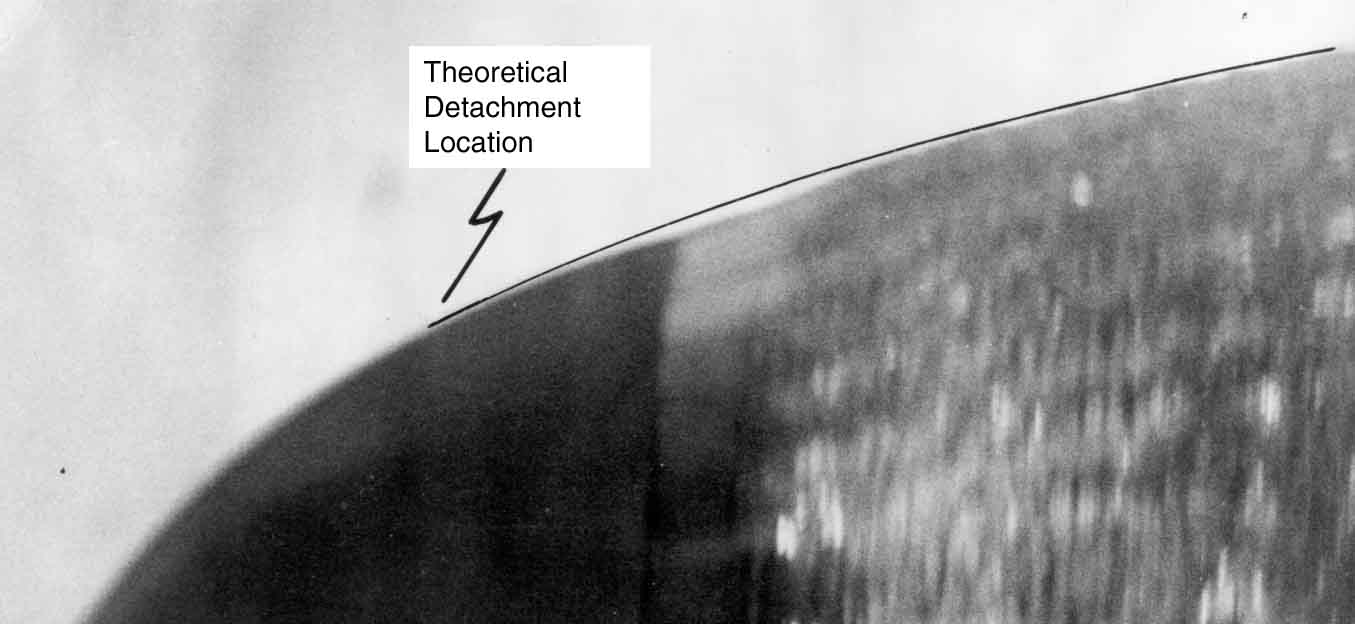
It is worth noting that, despite the discrepancies between the observed locations of detachment and those predicted by the smooth detachment condition, the profile of the cavity is not as radically affected as one might imagine. Figure 8.7, taken from Brennen (1969a), is a photograph showing the profile of a fully developed cavity on a sphere. On it is superimposed the profile of the theoretical solution. Note the close proximity of the profiles despite the substantial discrepancy in the detachment points.
|
| Figure 8.7 Comparison of the theoretical and experimental profiles of a fully developed cavity behind a sphere. The flow is from the left to the right. From Brennen (1969a). |
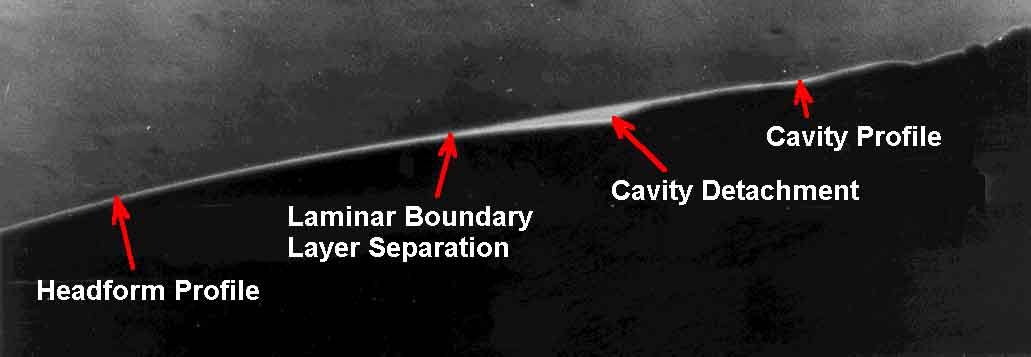
The viscous flow in the vicinity of an actual smooth detachment point is complex and still remains to be completely understood. Arakeri (1975) examined this issue experimentally using Schlieren photography to determine the behavior of the boundary layer and observed that boundary layer separation occurred upstream of free surface detachment as sketched in Figure 8.8 and shown in Figure 8.9. Arakeri also generated a quasi-empirical approach to the prediction of the distance between the separation and detachment locations, and this model seemed to produce detachment positions that were in good agreement with the observations. Franc and Michel (1985) studied this same issue both analytically and through experiments on hydrofoils, and their criterion for the detachment location has been used by several subsequent investigators.
|
| Figure 8.8 Model of the flow in the vicinity of a smooth detachment point. Adapted from Arakeri (1975). |
|
| Figure 8.9 Schlieren photograph showing boundary layer separation upstream of the free surface detachment on an axisymmetric headform. The cavitation number is 0.39 and the tunnel velocity is 8.1m/s. The actual distance between the separation and detachment points is about 0.28cm. Reproduced from Arakeri (1975) with permission of the author. |
In practice many of the methods used to solve free streamline problems involving detachment from a smooth surface simply assume a known location of detachment based on experimental observations (for example, Furuya and Acosta 1973) and neglect the difficulties associated with the resulting abrupt detachment solution.
8.4 WALL EFFECTS AND CHOKED FLOWS
Several useful results follow from the application of basic fluid mechanical principles to cavity flows constrained by uniform containing walls. Such would be the case, for example, for experiments in water tunnels. Consequently, in this section, we focus attention on the issue of wall effects in cavity flows and on the related phenomenon of choked flow. Anticipating some of the results of Figures 8.16 and 8.17, we observe that, for the same cavitation number, the narrower the tunnel relative to the body, the broader and longer the cavity becomes and the lower the drag coefficient. For a finite tunnel width, there is a critical cavitation number, σc , at which the cavity becomes infinitely long and no solutions exist for σ<σc. The flow is said to be choked at this limiting condition because, for a fixed tunnel pressure and a fixed cavity pressure, a minimum cavitation number implies an upper limit to the tunnel velocity. Consequently the choking phenomenon is analogous to that which occurs in a the nozzle flow of a compressible fluid (see Section 6.5). The phenomenon is familiar to those who have conducted experiments on fully developed cavity flows in water tunnels. When one tries to exceed the maximum, choked velocity, the water tunnel pressure rises so that the cavitation number remains at or above the choked value.
|
| Figure 8.10 Body with infinitely long cavity under choked flow conditions. |
In the choked flow limit of an infinitely long cavity, application of the equations of conservation of mass, momentum, and energy lead to some simple relationships for the parameters of the flow. Referring to Figure 8.10, consider a body with a frontal projected area of AB in a water tunnel of cross-sectional area, AT. In the limit of an infinitely long cavity, the flow far downstream will be that of a uniform stream in a straight annulus, and therefore conservation of mass requires that the limiting cross-sectional area of the cavity, Ac , be given by
 | ......(8.12) |
 | ......(8.13) |
 | ......(8.14) |
A second, useful result emerges when the momentum theorem is applied to the flow, again assumed frictionless. Then, in the limit of choked flow, the drag coefficient, CD(σc), is given by
 | ......(8.15) |
 | ......(8.16) |
Wall effects and choked flow for lifting bodies have been studied by Cohen and Gilbert (1957), Cohen et al. (1957), Fabula (1964), Ai (1966), and others because of their importance to the water tunnel testing of hydrofoils. Moreover, similar phenomena will clearly occur in other internal flow geometries, for example that of a pump impeller. The choked cavitation numbers that emerge from such calculations can be very useful as indicators of the limiting cavitation operation of turbomachines such as pumps and turbines (see Section 8.9).
Finally, it is appropriate to add some comments on the wall effects in finite cavity flows for which σ>σc. It is counterintuitive that the blockage effect should cause a reduction in the drag at the same cavitation number as illustrated in Figure 8.16. Another remarkable feature of the wall effect, as Wu et al. (1971) demonstrate, is that the more streamlined the body the larger the fractional change in the drag caused by the wall effect. Consequently, it is more important to estimate and correct for the wall effects on streamline bodies than it is for bluff bodies with the same blockage ratio, AB/AT. Wu et al. (1971) evaluate these wall effects for the planar flows past cavitating wedges of various vertex angles (then AB/AT=b/B, Figure 8.15) and suggest the following procedure for estimating the drag in the absence of wall effects. If during the experiment one were to measure the minimum coefficient of pressure, Cpw, on the tunnel wall at the point opposite the maximum width of the cavity, then Wu et al. recommend use of the following correction rule to estimate the coefficient of drag in the absence of wall effects, CD(σ′,0), from the measured coefficient, CD(σ,b/B). The effective cavitation number for the unconfined flow is found to be σ′ where
 | ......(8.17) |
 | ......(8.18) |
The classic free streamline solution for an arbitrary finite body with a fully developed cavity is obtained by mapping both the geometry of the physical plane (z-plane, Figure 8.2) and the geometry of the f-plane (Figure 8.11) into the lower half of a parametric, ζ-plane. The wetted surface is mapped onto the interval, η=0, -1<ξ<1 and the stagnation point, 0, is mapped into the origin. For the three closure models of Figure 8.2, the geometries of the corresponding ζ-planes are sketched in Figure 8.11. The f=f(ζ) mapping follows from the generalized Schwarz-Christoffel transformation (Gilbarg 1949); for the three closure models of Figures 8.2 and 8.11 this yields respectively
 | ......(8.19) |
 | ......(8.20) |
 | ......(8.21) |
|
| Figure 8.11 Streamlines in the complex potential f-plane and the parametric ζ-plane where the flow boundaries and points correspond to those of Figure 8.2. |
The wetted surface, AOB, will be given parametrically by x(s),y(s)
where s is the distance measured along that surface from the point A.
Then the boundary conditions on
the logarithmic hodograph variable,
=χ+iθ, are
 | ......(8.22) |
 | ......(8.23) |
 | ......(8.24) |
 | ......(8.25) |
 | ......(8.26) |
2(ζ),
is zero for the Riabouchinsky
and open-wake closure models; it is only required for the reentrant jet
model and, in that case,
 | ......(8.27) |
(ζ), the physical coordinate z(ζ) is then
calculated using
 | ......(8.28) |
 | ......(8.29) |
 | ......(8.30) |
 | ......(8.31) |
Now consider the conditions that can be applied to evaluate the unknown parameters in the problem, namely C and ζi in the case of the Riabouchinsky model, C, ζi, and ζc in the case of the open-wake model, and C, ζi, ζR, and ζJ in the case of the reentrant jet model. All three models require that the total wetted surface length, s(1), be equal to a known value, and this establishes the length scale in the flow. They also require that the velocity at z→∞ have the known magnitude, U∞, and a given inclination, α, to the chord, AB. Consequently this condition becomes
 | ......(8.32) |
As is the case with all steady planar potential flows involving a body in an infinite uniform stream, the behavior of the complex velocity, w(z), far from the body can be particularly revealing. If w(z) is expanded in powers of 1/z then
 | ......(8.33) |
The mathematical detail involved in producing results from these solutions (Wu and Wang 1964b) is considerable except for simple symmetric bodies. For more complex, bluff bodies it is probably more efficient to resort to one of the modern numerical methods (for example a panel method) rather than to attempt to sort through all the complex algebra of the above solutions. For streamlined bodies, a third alternative is the algebraically simpler linear theory for cavity flow, which is briefly reviewed in Section 8.7. There are, however, a number of valuable results that can be obtained from the above exact, nonlinear theory, and we will examine just a few of these in the next section.
Wu (1956, 1962) (see also Mimura 1958) generated the solution for a flat plate at an arbitrary angle of incidence using the open-wake model and the methods described in the preceding section. The comparison between the predicted pressure distributions on the surface of the plate and those measured by Fage and Johansen (1927) in single phase, separated wake flow is excellent, as shown by the examples in Figure 8.12. Note that the effective cavitation number for the wake flow (or base pressure coefficient) is not an independent variable as it is with cavity flows. In Figure 8.12 the values of σ are taken from the experimental measurements. Data such as that presented in Figure 8.12 provides evidence that free streamline methods have value in wake flows as well as in cavity flows.
|
| Figure 8.12 Comparison of pressure distributions on the surface of a flat plate set at an angle, α, to the oncoming stream. The theory of Wu (1956, 1962) (solid lines) is compared with the measurements in wake flow made by Fage and Johansen (1927) (circles). The case on the left is for a flat plate set normal to the stream (α=90°) and a wake coefficient of σ=1.38; the case on the right is α=29.85°, σ=0.924. Adapted from Wu (1962). |
The lift and drag coefficients at various cavitation numbers and angles of incidence are compared with the experimental data of Parkin (1958) and Silberman (1959) in Figures 8.13 and 8.14. Data both for supercavitating and partially cavitating conditions are shown in these figures, the latter occurring at the higher cavitation numbers and lower incidence angles. The calculations tend to be quite unstable in the region of transition from the partially cavitating to the supercavitating state, and so the dashed lines in Figures 8.13 and 8.14 represent smoothed curves in this region. Later, in Section 8.8, we continue the discussion of this transition. For the present, note that the nonlinear theory yields values for the lift and the drag that are in good agreement with the experimental measurements. Wu and Wang (1964a) show similar good agreement for supercavitating, circular-arc hydrofoils.
|
| Figure 8.13 Lift coefficients for a flat plate from the nonlinear theory of Wu (1962). The experimental data (Parkin 1958) is for angles of incidence as follows: 8° (upsidedown triangles), 10° (squares), 15° (triangles), 20° (circles with +), 25° (circles with ×), and 30° (diamonds). Also shown is some data of Silberman (1959) in a free jet tunnel: 20° (+) and 25° (×). |
|
| Figure 8.14 Drag coefficients corresponding to the lift coefficients of Figure 8.13. |
The solution to the cavity flow of a flat plate set normal to an oncoming stream, α=90°, is frequently quoted (Birkkoff and Zarantonello 1957, Woods 1961), usually for the case of the Riabouchinsky model. At small cavitation numbers (large cavities) the asymptotic form of the drag coefficient, CD, is (Wu 1972)
 | ......(8.34) |
 | ......(8.35) |
Since experiments are almost always conducted in water tunnels of finite width, 2B, another set of solutions of interest are those in which straight tunnel boundaries are added to the geometries of the preceding section, as shown in Figure 8.15. In the case of symmetric wedges in tunnels, solutions for all three closure models of Figure 8.2 were obtained by Wu et al. (1971). Drag coefficients, cavity dimensions, and pressure distributions were computed as functions of cavitation number, σ, and blockage ratio, b/B. As illustrated in Figure 8.16, the results compare well with experimental measurements provided the cavitation number is low enough for a fully developed cavity to be formed (see Section 7.8). In the case shown in Figure 8.16, this cavitation number was about 1.5. The Riabouchinsky model results are shown in the figure since they were marginally better than those of the other two models insofar as the drag on the wedge was concerned. The variations with b/B shown in Figure 8.16 were discussed in Section 8.4.
|
| Figure 8.15 Notation for planar flow in a water tunnel. |
|
| Figure 8.16 Analytical and experimental data for the drag coefficient, CD, of a 30° half-angle wedge with a fully developed cavity in a water tunnel. Data are presented as a function of cavitation number, σ, for various ratios of wedge width to tunnel width, b/B (see Figure 8.15). Results are shown for the Riabouchinsky model (solid lines) including the choked flow conditions (dashed line with points for various b/B indicated by arrows), for the experimental measurements (open symbols), and for the experimental data corrected to b/B→0. Adapted from Wu, Whitney, and Brennen (1971). |
For comparative purposes, some results for a cavitating sphere in an axisymmetric water tunnel are presented in Figures 8.17 and 8.18. These results were obtained by Brennen (1969a) using a numerical method (see Section 8.11). Note that the variations with tunnel blockage are qualitatively similar to those of planar flow. However, the calculated drag coefficients in Figure 8.18 are substantially larger than those experimentally measured because of the difference in the detachment locations discussed in Section 8.3 and illustrated in Figure 8.5.
|
| Figure 8.17 The dimensions of a fully developed cavity behind a sphere of radius, b, for various tunnel radii, B, from the numerical calculations of Brennen (1969a). On the left the maximum radius of the cavity, d, is compared with some results from Rouse and McNown (1948). On the right the half-length of the cavity, ℓ, is compared with the experimental data of Brennen (1969a) (circles) for which B/b=14.7. |
|
| Figure 8.18 Calculated and measured drag coefficients for a sphere of radius, b, as a function of cavitation number, σ. The numerical results are by Armstrong and Tadman (1954) and Brennen (1969a) (for various tunnel radii, B) and the experimental data are from Eisenberg and Pond (1948) and Hsu and Perry (1954). |
Reichardt (1945) carried out some of the earliest experimental investigations of fully developed cavities and observed that, when the cavitation number becomes very small, the maximum width, 2d, and the length, 2ℓ, of the cavity in an unconfined flow (b/B=0) vary roughly with σ in the following way:
- In planar flow:

......(8.36) - In axisymmetric flow:

......(8.37)
When the body/cavity system is slender in the sense that the direction of the velocity vector is everywhere close to that of the oncoming uniform stream (except, perhaps, close to some singularities), then methods similar to those of thin airfoil theory (see, for example, Biot 1942) become feasible. The approximations involved lead to a more tractable mathematical problem and to approximate solutions in circumstances in which the only alternative would be the application of more direct numerical methods. Linear theories for cavity flows were pioneered by Tulin (1953). Though the methods have been extended to three-dimensional flows, it is convenient to begin by describing their application to the case of an inviscid and incompressible planar flow of a uniform stream of velocity, U∞, past a single, streamlined cavitating body. It is assumed that the body is slender and that the wetted surface is described by y=h(x) where dh/dx « 1. It is also assumed that the boundary conditions on the body and the cavity can, to a first approximation, be applied on the x-axis as shown in Figure 8.19. The velocity components at any point are denoted by u=U∞+u′ and v where the linearization requires that both u′ and v are much smaller than U∞. The appropriate boundary condition on the wetted surface is then
 | ......(8.38) |
 | ......(8.39) |
Even within the confines of this simple problem, several different configurations of wetted surface and free surface are possible, as illustrated by the two examples in Figure 8.19. Moreover, various types of singularity can occur at the end points of any segment of boundary in the linearized plane (points A through G in Figure 8.19). It is important that the solution contain the correct singular behavior at each of these points. Consider the form that the complex conjugate perturbation velocity, w=u′-iv, must take for each of the different types of singularity that can occur. Let x=c be the location of the specific singularity under consideration. Clearly, then, a point like D, the stagnation point at a rounded nose or leading edge, must have a solution of the form w ~ i(z-c)-½ (Newman 1956). On the other hand, a sharp leading edge from which a free surface detaches (such as A) must have the form w ~ i(z-c)-¼ (Tulin 1953). These results are readily derived by applying the appropriate conditions of constant v or constant u′ on θ=0 and θ=2π.
|
| Figure 8.19 Examples of the linearized geometry (lower figures) for two planar cavity flows (upper sketches): a partially cavitating foil (left) and a supercavitating headform (right). Solid boundaries are indicated by the thick lines and the free streamlines by the thick dashed lines. |
The conditions at regular detachment points such as E or F (as opposed to the irregular combination of a detachment point and front stagnation point at A) should follow the conditions derived earlier for detachment points (Section 8.3). If it is an abrupt detachment point, then w is continous and the singular behavior is w ~ (z-c)½; on the other hand, if it is a smooth detachment point, both w and dw/dz must be continuous and w ~ (z-c)3/2. At cavity closure points such as B or G various models have been employed (Tulin 1964). In the case of the supercavitating body, Tulin's (1953) original model assumes that the point G is a stagnation point so that the singular behavior is w ~ (z-c)½; this is also the obvious choice under the conditions that u′ is constant on θ=±π. However, with this closure condition the circulation around the body-cavity system can no longer be arbitrarily prescribed. Other closure conditions that address this issue have been discussed by Fabula (1962), Woods and Buxton (1966), Nishiyama and Ota (1971), and Furuya (1975a), among others. In the case of the partial cavity almost all models assume a stagnation point at the point B so that the singular behavior is w ~ (z-c)½. The problem of prescription of circulation that occurred with the supercavitation closure does not arise in this case since the conventional, noncavitating Kutta condition can be applied at the trailing edge, C.
The literature on linearized solutions for cavity flow problems is too large for thorough coverage in this text, but a few important milestones should be mentioned. Tulin's (1953) original work included the solution for a supercavitating flat plate hydrofoil with a sharp leading edge. Shortly thereafter, Newman (1956) showed how a rounded leading edge might be incorporated into the linear solution and Cohen, Sutherland, and Tu (1957) provided information on the wall effects in a tunnel of finite width. Acosta (1955) provided the first partial cavitation solution, specifically for a flat plate hydrofoil (see below). For a more recent treatment of supercavitating single foils, the reader is referred to Furuya and Acosta (1973).
It is appropriate to examine the linear solution to a typical cavity flow problem and, in the next section, the details for a cavitating flat plate hydrofoil will be given.
Many other types of cavitating flow have been treated by linear theory, including such problems as the effect of a nearby ocean surface. An important class of solutions is that involving cascades of foils, and these are addressed in Section 8.9.
|
| Figure 8.20 The ζ-plane for the linearized theory of a partially cavitating flat plate hydrofoil. |
The algebra associated with the linear solutions for a flat plate hydrofoil is fairly simple, so we will review and examine the results for the supercavitating foil (Tulin 1953) and for the partially cavitating foil (Acosta 1955). Starting with the latter, the z-plane is shown on the left in Figure 8.19, and this can be mapped into the upper half of the ζ-plane in Figure 8.20 by
 | ......(8.40) |
 | ......(8.41) |
The conditions that remain to be applied are those at the point of infinity in the physical plane, η=i. The nature of the solution near this point should therefore be examined by expanding in powers of 1/z. Since ζ→i+i/2z+O(z-2) and since we must have that w→-iαU∞, expanding Equation 8.41 in powers of 1/z allows evaluation of the real constants, C0 and C1, in terms of α and σ:
 | ......(8.42) |
 | ......(8.43) |
 | ......(8.44) |
 | ......(8.45) |
In the supercavitating case, Tulin's (1953) solution yields the following results in place of Equations 8.44 and 8.45:
 | ......(8.46) |
 | ......(8.47) |
The lift coefficient and the cavity length from Equations 8.44 to 8.47 are plotted against cavitation number in Figure 8.21 for a typical angle of attack of α=4°. Note that as σ→∞ the fully wetted lift coefficient, 2πα, is recovered from the partial cavitation solution, and that as σ→0 the lift coefficient tends to πα/2. Notice also that both the solutions become pathological when the length of the cavity approaches the chord length (ℓ→1). However, if some small portion of each curve close to ℓ=1 is eliminated, then the characteristic decline in the performance of the hydrofoil as the cavitation number is decreased can be observed. Specifically, it is seen that the decline in the lift coefficient begins when σ falls below about 0.7 for the flat plate at an angle of attack of 4°. Close to σ=0.7, one observes a small increase in CL before the decline sets in, and this phenomenon is often observed in practice, as illustrated by the experimental data of Wade and Acosta (1966) included in Figure 8.21.
|
| Figure 8.21 Typical results from the linearized theories for a cavitating flat plate at an angle of attack of 4°. The lift coefficients, CL (solid lines), and the ratios of cavity length to chord, ℓ (dashed lines), are from the supercavitation theory of Tulin (1953) and the partial cavitation theory of Acosta (1955). Also shown are the experimental results of Wade and Acosta (1966) for ℓ (triangles) and for CL (circles) where the open symbols represent points of stable operation and the solid symbols denote points of unstable cavity operation. |
The variation in the lift with angle of attack (for a fixed cavitation number) is presented in Figure 8.22. Also shown in this figure are the lines of ℓ=4/3 in the supercavitation solution and ℓ=3/4 in the partial cavitation solution. Note that these lines separate regions for which dCL/dα>0 from those for which dCL/dα<0. Heuristically it could be argued that dCL/dα<0 implies an unstable flow and the corresponding region in figure 8.22 for which 3/4<ℓ<4/3 does, indeed, correspond quite closely to the observed regime of unstable cavity oscillation (Wade and Acosta 1966).
|
| Figure 8.22 The lift coefficient for a flat plate from the partial cavitation model of Acosta (1955) (dashed lines) and the supercavitation model of Tulin (1953) (solid lines) as a function of angle of attack, α, for several cavitation numbers, σ, as shown. The dotted lines are the boundaries of the region in which the cavity length is between 3/4 and 4/3 of a chord and in which dCL/dα<0. |
Because cavitation problems are commonly encountered in liquid turbomachines (pumps, turbines) and on propellers, the performance of a cascade of hydrofoils under cavitating conditions is of considerable practical importance. A typical cascade geometry (z-plane) is shown on the left in Figure 8.23; in the terminology of these flows the angle, β, is known as the ``stagger angle'' and 1/h, the ratio of the blade chord to the distance between the blade tips, is known as the ``solidity.'' The corresponding complex potential plane (f-plane) is shown on the right. Note that the geometry of the linearized physical plane is very similar to that of the f-plane.
|
| Figure 8.23 On the left is the physical plane (z-plane), and on the right is the complex potential plane (f-plane) for the planar flow through a cascade of cavitating hydrofoils. The example shown is for supercavitating foils. For partial cavitation the points D and E merge and the point C is on the upper wetted surface of the foil. For a sharp leading edge the points A and B merge. Figures adapted from Furuya (1975a). |
The first step in the analysis of the planar potential flow in a cascade (whether by linear or nonlinear methods) is to map the infinite array of blades in the f-plane (or the linearized z-plane) into a ζ-plane in which there is a single wetted surface boundary and a single cavity surface boundary. This is accomplished by the well-known cascade mapping function
 | ......(8.48) |
|
| Figure 8.24 The ζ-plane obtained by using the cascade mapping function. |
For a supercavitating cascade, a nonlinear solution was first obtained by Woods and Buxton (1966) for the case of a cascade of flat plates. Furuya (1975a) expanded this work to include foils of arbitrary geometry. An interesting innovation introduced by Woods and Buxton was the use of Tulin's (1964) double-spiral-vortex model for cavity closure, but with the additional condition that the difference in the velocity potentials at the points C and D (Figure 8.23) should be equal to the circulation around the foil.
Linear theories for a cascade began much earlier with the work of Betz and Petersohn (1931), who solved the problem of infinitely long, open cavities produced by a cascade of flat plate hydrofoils. Sutherland and Cohen (1958) generalized this to the case of finite supercavities behind a flat plate cascade, and Acosta (1960) solved the same problem but with a cascade of circular-arc hydrofoils. Other early contributions to linear cascade theory for supercavitating foils include the models of Duller (1966) and Hsu (1972) and the inclusion of the effect of rounded leading edges by Furuya (1974).
|
| Figure 8.25 The linearized z-plane (left) and the ζ-plane (right) for the linear solution of partial cavitation in an infinitely long cascade of flat plates (Acosta and Hollander 1959). The points E∞ and H∞ are respectively the points at upstream and downstream infinity in the z-plane. |
Cavities initiated at the leading edge are more likely to extend beyond the trailing edge when the solidity and the stagger angle are small. Such cascade geometries are more characteristic of propellers and, therefore, the supercavitating cascade results are more often utilized in that context. On the other hand, most cavitating pumps have larger solidities (>1) and large stagger angles. Consequently, partial cavitation is the more characteristic condition in pumps, particularly since the pressure rise through the pump is likely to collapse the cavity before it emerges from the blade passage. Partially cavitating cascade analysis began with the work of Acosta and Hollander (1959), who obtained the linear solution for a cascade of infinitely long flat plates, the geometry of which is shown in Figure 8.25. The appropriate cascade mapping is then the version of Equation 8.48 with z on the left-hand side. The Acosta and Hollander solution is algebraically simple and therefore makes a good, specific example. The length of the cavity in the ζ-plane, a, provides a convenient parameter for the problem and should not be confused with the actual cavity length, ℓ. Given the square-root singularities at A and C, the complex velocity, w(ζ), takes the form
 | ......(8.49) |
 | ......(8.50) |
 | ......(8.51) |
 | ......(8.52) |
 | ......(8.53) |
 | ......(8.54) |
Note, however, that under the conditions of an inviscid model, a small partial cavity will not significantly alter the performance of the cascade of higher solidity (say, 1/h>1) since the discharge, with or without the cavity, is essentially constrained to follow the direction of the blades. On the other hand, the direction of flow downstream of a supercavitating cascade will be significantly affected by the cavities, and the corresponding lift and drag coefficients will be altered by the cavitation. We return to the subject of supercavitating cascades to demonstrate this effect.
A substantial body of data on the performance of cavitating cascades has been accumulated through the efforts of Numachi (1961, 1964), Wade and Acosta (1967), and others. This allows comparison with the analytical models, in particular the supercavitating theories. Figure 8.26 provides such a comparison between measured lift and drag coefficients (defined as normal and parallel to the direction of the incident stream) for a particular cascade and the theoretical results from the supercavitating theories of Furuya (1975a) and Duller (1966). Note that the measured lift coefficients exhibit a rapid decline in cascade performance as the cavitation number is reduced and the supercavities grow. However, it is important to observe that this degradation does not occur until the cavitation is quite extensive. The cavitation inception numbers for the experiments were σi=2.35 (for 8°) and σi=1.77 (for 9°). However, the cavitation number must be lowered to about 0.5 before the performance is adversely affected. In the range of σ in between are the partial cavitation states for which the performance is little changed.
|
| Figure 8.26 Lift and drag coefficients as functions of the cavitation number for cascades of solidity, 0.625, and stagger angle, β=45°-α, operating at angles of incidence, α, of 8° (triangles) and 9° (squares). The points are from the experiments of Wade and Acosta (1967), and the analytical results for a supercavitating cascade are from the linear theory of Duller (1966) (dashed lines) and the nonlinear theory of Furuya (1975a) (solid lines). |
For the cascades and incidence angles used in the example of Figure 8.26, Furuya (1975a) shows that the linear and nonlinear supercavitation theories yield results that are similar and close to those of the experiments. This is illustrated in Figure 8.26. However, Furuya also demonstrates that there are circumstances in which the linear theories can be substantially in error and for which the nonlinear results are clearly needed. The effect of the solidity, 1/h, on the results is also important because it is a major design factor in determining the number of blades in a pump or propeller. Figure 8.27 illustrates the effect of solidity when large supercavities are present (σ=0.18). Note that the solidity has remarkably little effect.
|
| Figure 8.27 Lift and drag coefficients as functions of the solidity for cascades of stagger angle, β=45°-α, operating at the indicated angles of incidence, α, and at a cavitation number, σ=0.18. The points are from the experiments of Wade and Acosta (1967), and the lines are from the nonlinear theory of Furuya (1975). Reproduced from Furuya (1975a). |
Though numerical methods seem to be in the ascendant, several efforts have been made to treat three-dimensional cavity flows analytically. Early analyses of attached cavities on finite aspect ratio foils combined the solutions for planar flows with the corrections known from finite aspect ratio aerodynamics (Johnson 1961). Later, stripwise solutions for cavitating foils of finite span were developed in which an inner solution from either a linear or a nonlinear theory was matched to an outer solution from lifting line theory. This approach was used by Nishiyama (1970), Leehey (1971), and Furuya (1975b) to treat supercavitating foils and by Uhlman (1978) for partially cavitating foils. Widnall (1966) used a lifting surface method in a three-dimensional analysis of supercavitating foils.
For more slender bodies such as delta wings, the linearized procedure outlined in Section 8.7 can be extended to three-dimensional bodies in much the same way as it is applied in the slender body theories of aerodynamics. Tulin (1959) and Cumberbatch and Wu (1961) used this approach to model cavitating delta wings.
8.11 NUMERICAL METHODS
With the modern evolution of computational methods it has become increasingly viable to consider more direct numerical methods for the solution of free surface flows, even in circumstances in which analytical solutions could be generated. It would be beyond the scope of this text to survey these computational methods, and so we confine our discussion to some brief comments on the methods used in the past. These can be conveniently divided into two types. Some of the literature describes ``field'' methods in which the entire flow field is covered by a lattice of grids and node points at which the flow variables are evaluated. But most of the work in the past has focused on the use of ``boundary element'' methods that make use of superposition of the fundamental singularity solutions for potential flows. A few methods do not fit into these categories; for example, the expansion technique devised by Garabedian (1956) in order to construct axisymmetric flow solutions from the corresponding planar flows.
Methods for the synthesis of potential flows using distributed singularities can, of course, be traced to the original work of Rankine (1871). The first attempts to use distributions of sources and sinks to find solutions to axisymmetric cavity flow problems appear to have been made by Reichardt and Munzner (1950). They distributed doublets on the axis and sought symmetric, Rankine-like body shapes with nearly constant surface pressure except for fore and aft caps in order to simulate Riabouchinsky flows. The problem with this approach is its inability to model the discontinuous or singular behavior at the free surface detachment points. This requires a distribution of surface singularities that can either be implemented explicitly (most conveniently with surface vortex sheet elements) or by the equivalent use of Green's function methods as pioneered by Trefftz (1916) in the context of jets. Distributions of surface singularities to model cavity flows were first employed by Landweber (1951), Armstrong and Dunham (1953), and Armstrong and Tadman (1954). The latter used these methods to generate solutions for the axisymmetric Riabouchinsky solutions of cavitating discs and spheres. The methods were later extended to three-dimensional potential flows by Struck (1966), who addressed the problem of an axisymmetric body at a small angle of attack to the oncoming stream.
As computational capacity grew, it became possible to examine more complex three-dimensional flows and lifting bodies using boundary element methods. For example, Lemonnier and Rowe (1988) computed solutions for a partially cavitating hydrofoil and Uhlman (1987, 1989) has generated solutions for hydrofoils with both partial cavitation and supercavitation. These methods solve for the velocity. The position of the cavity boundary is determined by an iterative process in which the dynamic condition is satisfied on an approximate cavity surface and the kinematic condition is used to update the location of the surface. More recently, a method that uses Green's theorem to solve for the potential has been developed by Kinnas and Fine (1990) and has been applied to both partially and supercavitating hydrofoils. This appears to be superior to the velocity-based methods in terms of convergence.
Efforts have also been made to develop ``field'' methods for cavity flows. Southwell and Vaisey (1946) (see also Southwell 1948) first explored the use of relaxation methods to solve free surface problems but did not produce solutions for any realistic cavity flows. Woods (1951) suggested that solutions to axisymmetric cavity flows could be more readily obtained in the geometrically simpler (φ, ψ) plane, and Brennen (1969a) used this suggestion to generate Riabouchinsky model solutions for a cavitating disc and sphere in a finite water tunnel (see Figures 8.5, 8.17 and 8.18). In more recent times, it has become clear that boundary integral methods are more efficient for potential flows. However, field methods must still be used when seeking solutions to the more complete viscous flow problem. Significant progress has been made in the last few years in developing Navier-Stokes solvers for free surface problems in general and cavity flow problems in particular (see, for example, Deshpande et al. 1993).
8.12 UNSTEADY FLOWS
Most of the analyses in the preceding sections addressed various steady free streamline flows. The corresponding unsteady flows pose more formidable modeling problems, and it is therefore not surprising that progress in solving these unsteady flows has been quite limited. Though Wang and Wu (1965) show how a general perturbation theory of cavity flows may be formulated, the implementation of their methodology to all but the simplest flows may be prohibitively complicated. Moreover, there remains much uncertainity regarding the appropriate closure model to use in unsteady flow. Consequently, the case of zero cavitation number raises less uncertainty since it involves an infinitely long cavity and no closure. We will therefore concentrate on the linear solution of the problem of small amplitude perturbations to a mean flow with zero cavitation number. This problem was first solved by Woods (1957) in the context of an oscillating aerofoil with separated flow but can be more confidently applied to the cavity flow problem. Martin (1962) and Parkin (1962) further refined Woods' theory and provided tabulated data for the unsteady force coefficients, which we will utilize in this summary.
The unsteady flow problem is best posed using the ``acceleration potential'' (see, for example, Biot 1942), denoted here by φ′ and defined simply as (p∞-p)/ρ, so that linearized versions of Euler's equations of motion may be written as
 | ......(8.55) |
 | ......(8.56) |
 | ......(8.57) |
 | ......(8.58) |
 that is
undergoing small-amplitude oscillations in both heave
and pitch at a frequency, ω. The
amplitude and phase of the pitching oscillations are incorporated in
the complex quantity,
that is
undergoing small-amplitude oscillations in both heave
and pitch at a frequency, ω. The
amplitude and phase of the pitching oscillations are incorporated in
the complex quantity,
 , so that the
instantaneous angle of incidence is given by
, so that the
instantaneous angle of incidence is given by
 | ......(8.59) |
 (positive
in the negative y direction) so that
(positive
in the negative y direction) so that
 | ......(8.60) |
 | ......(8.61) |
In the linearized form this mathematical problem is quite similar to that of the steady flow for a cavitating foil at an angle of attack and can be solved by similar methods (Woods 1957, Martin 1962). The resulting instantaneous lift and moment coefficients can be decomposed into components due to the pitch and the heave:
 | ......(8.62) |
 | ......(8.63) |
 ,
,
 ,
,
 , and
, and
 represent the important
dynamic characteristics of the
foil and are functions of the reduced frequency defined as
ω*=ωc/U∞
where c is the chord.
The tabulations
by Parkin (1962)
allow evaluation of these coefficients, and they are presented in Figure
8.29 as functions of the reduced frequency.
The values tabulated by Woods (1957) yield very similar
results. Note that when the reduced frequency is much less than unity,
the coefficients tend to their quasistatic values; in this limit all
but Re{} and
Re{} tend to zero,
and these two nonzero coefficients tend to the quasistatic values
of dCL/dα and dCM/dα,
namely π/2 and 5π/32,
respectively.
represent the important
dynamic characteristics of the
foil and are functions of the reduced frequency defined as
ω*=ωc/U∞
where c is the chord.
The tabulations
by Parkin (1962)
allow evaluation of these coefficients, and they are presented in Figure
8.29 as functions of the reduced frequency.
The values tabulated by Woods (1957) yield very similar
results. Note that when the reduced frequency is much less than unity,
the coefficients tend to their quasistatic values; in this limit all
but Re{} and
Re{} tend to zero,
and these two nonzero coefficients tend to the quasistatic values
of dCL/dα and dCM/dα,
namely π/2 and 5π/32,
respectively.
|
| Figure 8.29 Real and imaginary parts of the four unsteady lift and moment coefficients for a flat plate hydrofoil at zero cavitation number. |
Acosta and DeLong (1971) measured the oscillating forces on a cavitating
hydrofoil subjected to heave oscillations at various reduced
frequencies. Their results both for cavitating and noncavitating flow
are presented in Figure 8.30 for several mean angles of incidence,
.
The analytical results from figure 8.29 are included in this figure
and compare fairly well with the experiments. Indeed, the agreement is
better than is manifest between theory and experiment in the noncavitating
case, perhaps because the oscillations of the pressure in the separated region
or wake of the noncavitating flow are not adequately modeled.
|
| Figure 8.30
Fluctuating lift coefficients, ,
for foils undergoing heave oscillations at various reduced frequencies,
ω*. Real and imaginary parts of
/ω*
are presented for noncavitating flow at mean incidence angles of
0° and 6° (solid symbols) and for cavitating flow for a
mean incidence of
8°, for very long choked cavities (squares)
and for cavities 3
chords in length (diamonds). Adapted from Acosta and DeLong (1971).
|
Other advances in the treatment of unsteady linearized cavity flows were introduced by Wu (1957) and Timman (1958), and the original work of Woods was extended to finite cavitation numbers (finite cavities) by Kelly (1967), who found that the qualitative nature of the results was not dependent on σ. Later, Widnall (1966) showed how the linearized acceleration potential methods could be implemented in three dimensions. Another valuable extension would be to a cascade of foils, but the author is unaware of any similar unsteady data for cavitating cascades. Indeed, apart from the work of Sisto (1967), very little analytical work has been done on the problem of the unsteady response of separated flow in a cascade, a problem that is of considerable importance in the context of turbomachinery. Though progress has been made in understanding the ``dynamic stall'' of a single foil (see, for example, Ham 1968), there seems to be a clear need for further research on the unsteady behavior of separated and cavitating flows in cascades. The unsteady lift and moment coefficients are not only valuable in determining the unsteady characteristics of propulsion and lift systems but have also been used to predict the flutter and divergence characteristics of cavitating foils (for example, Brennen et al. 1980).
- Ackerberg, R.C. (1970). Boundary layer separation at a free streamline. Part 1. Two-dimensional flow. J. Fluid Mech., 44, 211--225.
- Ackerberg, R.C. (1975). The effects of capillarity on free streamline separation. J. Fluid Mech., 70, 333--352.
- Acosta, A.J. (1955). A note on partial cavitation of flat plate hydrofoils. Calif. Inst. of Tech. Hydro. Lab. Rep. E-19.9.
- Acosta, A.J. (1960). Cavitating flow past a cascade of circular arc hydrofoils. Calif. Inst. of Tech. Hydro. Lab. Rep. E-79.2.
- Acosta, A.J. (1973). Hydrofoils and hydrofoil craft. Ann. Rev. Fluid Mech., 5, 161--184.
- Acosta, A.J. and Hollander, A. (1959). Remarks on cavitation in turbomachines. Calif. Inst. of Tech. Eng. Div. Rep. No. 79.3
- Acosta, A.J. and DeLong, R.K. (1971). Experimental investigation of non-steady forces on hydrofoils oscillating in heave. Proc. IUTAM Symp. on non-steady flow of water at high speeds, Leningrad, USSR, 95--104.
- Ai, D.K. (1966). The wall effect in cavity flows. ASME J. Basic Eng., 88, 132--138.
- Arakeri, V.H. (1975). Viscous effects on the position of cavitation separation from smooth bodies. J. Fluid Mech., 68, 779--799.
- Armstrong, A.H. (1953). Abrupt and smooth separation in plane and axisymmetric flow. Memo. Arm. Res. Est., G.B., No. 22/63.
- Armstrong, A.H. and Dunham, J.H. (1953). Axisymmetric cavity flow. Rep. Res. Est., G.B., No. 12/53.
- Armstrong, A.H. and Tadman, K.G. (1954). Axisymmetric cavity flow about ellipsoids. Proc. Joint Admiralty-U.S.Navy Meeting on Hydroballistics.
- Betz, A. and Petersohn, E. (1931). Application of the theory of free jets. NACA TM No. 667.
- Biot, M.A. (1942). Some simplified methods in airfoil theory. J. Aero. Sci., 9, No. 5, 185--190.
- Birkhoff, G. and Zarantonello, E.H. (1957). Jets, wakes, and cavities. Academic Press.
- Brennen, C. (1969a). A numerical solution of axisymmetric cavity flows. J. Fluid Mech., 37, 671--688.
- Brennen, C. (1969b). Some viscous and other real fluid effects in fully developed cavity flows. In Cavitation State of Knowledge (eds: J.M. Robertson, G.F. Wislicenus), ASME, N.Y.
- Brennen, C. (1970). Some cavitation experiments with dilute polymer solutions. J. Fluid Mech., 44, 51--63.
- Brennen, C.E. and Acosta, A.J. (1973). Theoretical, quasistatic analysis of cavitation compliance in turbopumps. J. Spacecraft and Rockets, 10, No. 3, 175--180.
- Brennen, C.E., Oey, K., and Babcock, C.D. (1980). On the leading edge flutter of cavitating hydrofoils. J. Ship Res., 24, No. 3, 135--146.
- Brillouin, M. (1911). Les surfaces de glissement de Helmholtz et la resistance des fluides. Ann. Chim. Phys., 23, 145--230.
- Churchill, R.V. (1948). Introduction to complex variables and applications. McGraw-Hill Book Company.
- Cohen, H. and Gilbert, R. (1957). Two-dimensional, steady, cavity flow about slender bodies in channels of finite width. ASME J. Appl. Mech., 24, 170--176.
- Cohen, H., Sutherland, C.D., and Tu, Y-O. (1957). Wall effects in cavitating hydrofoil flow. J. Ship Res., 1, No. 3, 31--39.
- Cumberbatch, E. and Wu, T.Y. (1961) Cavity flow past a slender pointed hydrofoil. J. Fluid Mech., 11, 187--208.
- Deshpande, M., Feng, J., and Merkle, C. (1993). Navier-Stokes analysis of 2-D cavity flows. ASME Cavitation and Multiphase Flow Forum, FED-153, 149--155.
- Duller, G.A. (1966). On the linear theory of cascades of supercavitating hydrofoils. U.K. Nat. Eng. Lab. Rep. No. 218.
- Efros, D.A. (1946). Hydrodynamical theory of two-dimensional flow with cavitation. Dokl. Akad. Nauk. SSSR, 51, 267--270.
- Eisenberg, P. and Pond, H.L. (1948). Water tunnel investigations of steady state cavities. David Taylor Model Basin Rep. No. 668.
- Fabula, A.G. (1962). Thin airfoil theory applied to hydrofoils with a single finite cavity and arbitrary free-streamline detachment. J. Fluid Mech., 12, 227--240.
- Fabula, A.G. (1964). Choked flow about vented or cavitating hydrofoils. ASME J. Basic Eng., 86, 561--568.
- Fage, A. and Johansen, F.C. (1927). On the flow of air behind an inclined flat plate of infinite span. Proc. Roy. Soc., London, Series A, 116, 170--197.
- Franc, J.P. and Michel, J.M. (1985). Attached cavitation and the boundary layer: experimental investigation and numerical treatment. J. Fluid Mech., 154, 63--90.
- Furuya, O. and Acosta, A.J. (1973). A note on the calculation of supercavitating hydrofoils with rounded noses. ASME J. Fluids Eng., 95, 222--228.
- Furuya, O. (1974). Supercavitating linear cascades with rounded noses. ASME J. Basic Eng., Series D, 96, 35--42.
- Furuya, O. (1975a). Exact supercavitating cascade theory. ASME J. Fluids Eng., 97, 419--429.
- Furuya, O. (1975b). Three-dimensional theory on supercavitating hydrofoils near a free surface. J. Fluid Mech., 71, 339--359.
- Garabedian, P.R. (1956). The mathematical theory of three-dimensional cavities and jets. Bull. Amer. Math. Soc., 62, 219--235.
- Gilbarg, D. (1949). A generalization of the Schwarz-Christoffel transformation. Proc. U.S. Nat. Acad. Sci., 35, 609--612.
- Gilbarg, D. (1960). Jets and cavities. In Handbuch der Physik, Springer-Verlag, 9, 311--445.
- Gurevich, M.I. (1961). Theory of jets in ideal fluids. Academic Press, N.Y. (1965).
- Ham, N.D. (1968). Aerodynamic loading on a two-dimensional airfoil during dynamic stall. AIAA J., 6, 1927--1934.
- Helmholtz, H. (1868). &Uulm;ber diskontinuierliche Flüssigkeitsbewegungen. Monatsber. Akad. Wiss., Berlin, 23, 215--228.
- Hsu, C.C. (1972). On flow past a supercavitating cascade of cambered blades. ASME J. Basic Eng., Series D, 94, 163--168.
- Hsu, E.-Y. and Perry, B. (1954). Water tunnel experiments on spheres in cavity flow. Calif. Inst. of Tech. Hydro. Lab. Rep. No. E-24.9.
- Johnson, V.E. (1961). Theoretical and experimental investigation of supercavitating hydrofoils operating near the free surface. NASA TR R-93.
- Joukowski, N.E. (1890). I. A modification of Kirchhoff's method of determining a two-dimensional motion of a fluid given a constant velocity along an unknown streamline. II. Determination of the motion of a fluid for any condition given on a streamline. Mat. Sbornik (Rec. Math.), 15, 121--278.
- Kelly, H.R. (1967). An extension of the Woods theory for unsteady cavity flows. ASME J. Basic Eng., 89, 798--806.
- Kinnas, S.A. and Fine, N.E. (1990). Non-linear analysis of the flow around partially or super-cavitating hydrofoils on a potential based panel method. Proc. IABEM-90 Symp. Int. Assoc. for Boundary Element Methods, Rome, 289--300.
- Kirchhoff, G. (1869). Zur Theorie freier Flüssigkeitsstrahlen. Z. reine Angew. Math., 70, 289--298.
- Kreisel, G. (1946). Cavitation with finite cavitation numbers. Admiralty Res. Lab. Rep. R1/H/36.
- Landweber, L. (1951). The axially symmetric potential flow about elongated bodies of revolution. David Taylor Model Basin Report No. 761.
- Leehey, P. (1971). Supercavitating hydrofoil of finite span. Proc. IUTAM Symp. on Non-steady Flow of Water at High Speeds, Leningrad, 277--298.
- Lemonnier, H. and Rowe, A. (1988). Another approach in modelling cavitating flows. J. Fluid Mech., 195, 557--580.
- Levi-Civita, T. (1907). Scie e leggi di resistenzia. Rend. Circ. Mat. Palermo, 18, 1--37.
- Martin, M. (1962). Unsteady lift and moment on fully cavitating hydrofoils at zero cavitation number. J. Ship Res., 6, No. 1, 15--25.
- Mimura, Y. (1958). The flow with wake past an oblique plate. J. Phys. Soc. Japan, 13, 1048--1055.
- Newman, J.N. (1956). Supercavitating flow past bodies with finite leading edge thickness. David Taylor Model Basin Rep. No. 1081.
- Nishiyama, T. (1970). Lifting line theory of supercavitating hydrofoil of finite span. ZAMM, 50, 645--653.
- Nishiyama, T. and Ota, T. (1971). Linearized potential flow models for hydrofoils in supercavitating flows. ASME J. Basic Eng., 93, Series D, 550--564.
- Numachi, F. (1961). Cavitation tests on hydrofoils designed for accelerating flow cascade: Report 1. ASME J. Basic Eng., 83, Series D, 637--647.
- Numachi, F. (1964). Cavitation tests on hydrofoils designed for accelerating flow cascade: Report 3. ASME J. Basic Eng., 86, Series D, 543--555.
- Parkin, B.R. (1958). Experiments on circular-arc and flat plate hydrofoils. J. Ship Res., 1, 34--56.
- Parkin, B.R. (1959). Linearized theory of cavity flow in two-dimensions. The RAND Corp. (Calif.) Rep. No. P-1745.
- Parkin, B.R. (1962). Numerical data on hydrofoil reponse to non-steady motions at zero cavitation number. J. Ship Res., 6, No. 1, 40--42.
- Rankine, W.J.M. (1871). On the mathematical theory of stream lines, especially those with four foci and upwards. Phil. Trans. Roy. Soc., 267--306.
- Reichardt, H. (1945). The physical laws governing the cavitation bubbles produced behind solids of revolution in a fluid flow. Kaiser Wilhelm Inst. Hyd. Res., Gottingen, TPA3/TIB..
- Reichardt, H. and Munzner, H. (1950). Rotationally symmetric source-sink bodies with predominantly constant pressure distributions. Arm. Res. Est. Trans. No. 1/50.
- Riabouchinsky, D. (1920). On steady fluid motion with a free surface. Proc. London Math. Soc., 19, 206--215.
- Roshko, A. (1954). A new hodograph for free streamline theory. NACA TN 3168.
- Rouse, H. and McNown, J.M. (1948). Cavitation and pressure distribution: headforms at zero angles of yaw. Bull. St. Univ. Iowa, Eng., No. 32.
- Sedov, L.I. (1966). Plane problems in hydrodynamics and aerodynamics (in Russian). Izdat. ``Nauka'', Moscow.
- Silberman, E. (1959). Experimental studies of supercavitating flow about simple two-dimensional bodies in a jet. J. Fluid Mech., 5, 337--354.
- Sisto, F. (1967). Linearized theory of non-stationary cascades at fully stalled or supercavitating conditions. Zeitschrift fur Angewandte Mathematik und Mechanik, 8, 531--542.
- Southwell, R.V. and Vaisey, G. (1946). Fluid motions characterized by free streamlines. Phil. Trans., 240, 117--161.
- Southwell, R.V. (1948). Relaxation methods in mathematical physics. Oxford Univ. Press.
- Stripling, L.B. and Acosta, A.J. (1962). Cavitation in turbopumps---Part 1. ASME J. Basic Eng., Series D, 84, 326--338.
- Struck, H.G. (1970). Discontinuous flows and free streamline solutions for axisymmetric bodies at zero and small angles of attack. NASA TN D-5634.
- Sutherland, C.D. and Cohen, H. (1958). Finite cavity cascade flow. Proc. 3rd U.S. Nat. Cong. of Appl. Math., 837--845.
- Timman, R. (1958) A general linearized theory for cavitating hydrofoils in nonsteady flow. Proc. 2nd ONR Symp. on Naval Hydrodynamics, 559--579.
- Trefftz, E. (1916). Über die Kontraktion kreisföormiger Flüssigkeits-strahlen. Z. Math. Phys., 64, 34--61.
- Tulin, M.P. (1953). Steady two-dimensional cavity flows about slender bodies. David Taylor Model Basin Rep. 834.
- Tulin, M.P. (1959). Supercavitating flow past slender delta wings. J. Ship Res., 3, No. 3, 17--22.
- Tulin, M.P. (1964). Supercavitating flows---small perturbation theory. J. Ship Res., 7, No. 3, 16--37.
- Uhlman, J.S. (1978). A partially cavitated hydrofoil of finite span. ASME J. Fluids Eng., 100, No. 3, 353--354.
- Uhlman, J.S. (1987). The surface singularity method applied to partially cavitating hydrofoils. J. Ship Res., 31, No. 2, 107--124.
- Uhlman, J.S. (1989). The surface singularity or boundary integral method applied to supercavitating hydrofoils. J. Ship Res., 33, No. 1, 16--20.
- Villat, H. (1914). Sur la validite des solutions de certains problemes d'hydrodynamique. J. Math. Pures Appl.(6), 10, 231--290.
- Wade, R.B. (1967). Linearized theory of a partially cavitating cascade of flat plate hydrofoils. Appl. Sci. Res., 17, 169--188.
- Wade, R.B. and Acosta, A.J. (1966). Experimental observations on the flow past a planoconvex hydrofoil. ASME J. Basic Eng., 88, 273--283.
- Wade, R.B. and Acosta, A.J. (1967). Investigation of cavitating cascades. ASME J. Basic Eng., Series D, 89, 693--706.
- Wang, D.P. and Wu, T.Y. (1965). General formulation of a perturbation theory for unsteady cavity flows. ASME J. Basic Eng., 87, 1006-1010.
- Widnall, S.E. (1966). Unsteady loads on supercavitating hydrofoils. J. Ship Res., 9, 107--118.
- Woods, L.C. (1957). Aerodynamic forces on an oscillating aerofoil fitted with a spoiler. Proc. Roy. Soc. London, Series A, 239, 328--337.
- Woods, L.C. (1951). A new relaxation treatment of flow with axial symmetry. Quart. J. Mech. Appl. Math., 4, 358--370.
- Woods, L.C. (1961). The theory of subsonic plane flow. Cambridge Univ. Press.
- Woods, L.C. and Buxton, G.H.L. (1966). The theory of cascade of cavitating hydrofoils. Quart. J. Mech. Appl. Math., 19, 387--402.
- Wu, T.Y. (1956). A free streamline theory for two-dimensional fully cavitated hydrofoils. J. Math. Phys., 35, 236--265.
- Wu, T.Y. (1957). A linearized theory for nonsteady cavity flows. Calif. Inst. of Tech. Eng. Div. Rep. No. 85-6.
- Wu, T.Y. (1962). A wake model for free streamline flow theory, Part 1. Fully and partially developed wake flows and cavity flows past an oblique flat plate. J. Fluid Mech., 13, 161--181.
- Wu, T.Y. (1969). Cavity flow analysis; a review of the state of knowledge. In Cavitation State of Knowledge (eds: J.M. Robertson, G.F. Wislicenus), ASME, N.Y.
- Wu, T.Y. (1972). Cavity and wake flows. Ann. Rev. Fluid Mech., 4, 243--284.
- Wu, T.Y. and Wang, D.P. (1964a). A wake model for free streamline flow theory, Part 2. Cavity flows past obstacles of arbitrary profile. J. Fluid Mech., 18, 65--93.
- Wu, T.Y. and Wang, D.P. (1964b). An approximate numerical scheme for the theory of cavity flows past obstacles of arbitrary profile. ASME J. Basic Eng., 86, 556--560.
- Wu, T.Y., Whitney, A.K., and Brennen, C. (1971). Cavity-flow wall effect and correction rules. J. Fluid Mech., 49, 223--256.
Last updated 12/1/00.
Christopher E. Brennen